一个更好更快更强的序列标注成分句法分析器
韦阳
华东师范大学 计算机科学与技术硕士在读
原文链接:
Better, Faster, Stronger Sequence Tagging Constituent Parsersgodweiyang.com
为了看懂论文里的策略梯度,又去把强化学习看了一遍。。。
论文地址:
Better, Faster, Stronger Sequence Tagging Constituent Parsersarxiv.org
介绍
这篇论文主要是在之前的那篇论文
Constituent Parsing as Sequence Labelinggodweiyang.com
基础上解决了如下三个问题:
- 太长的短语预测错误率高。
- 输出空间太大导致label稀疏性。
- 贪心解码导致的错误传播。
本文提出的解决方法分别是:
- 采用融合了相对编码和绝对编码的动态编码。
- 将预测任务分解为多个子任务。
- 采用辅助任务和策略梯度。
三大问题以及解决方法
过长短语预测的高错误率
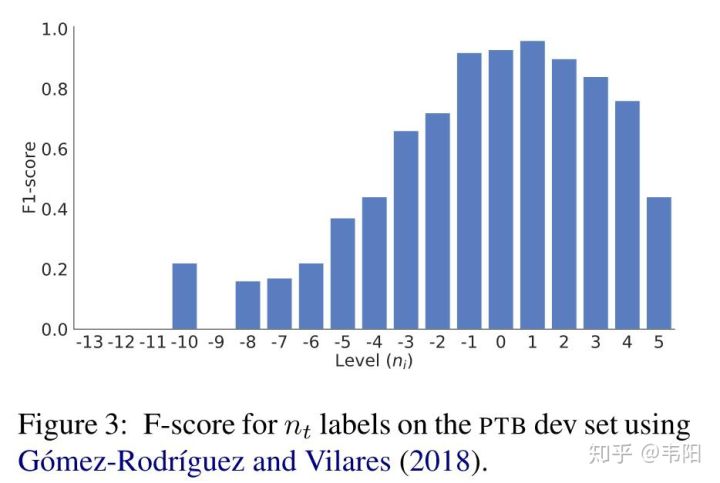
由下面这张图可以看出,当
 太小时,准确率就会大幅下降。这个问题主要体现在过长短语的闭合上,右括号的预测尤其困难。其实这也跟数据稀疏性有很大关系,训练集中过长短语毕竟占少数。
太小时,准确率就会大幅下降。这个问题主要体现在过长短语的闭合上,右括号的预测尤其困难。其实这也跟数据稀疏性有很大关系,训练集中过长短语毕竟占少数。
解决方法就是采用动态编码,如下图所示:
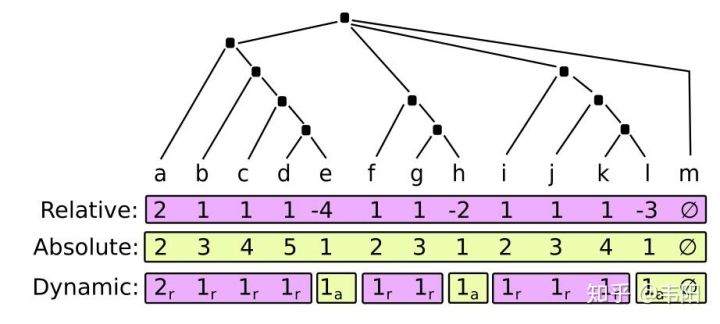
第一行是相对值编码,第二行是绝对值编码,之前文章都已经解释过了。第三行是结合了上面两种编码的动态编码,具体取值情况是大多数时候都还采用相对值编码,因为毕竟相对值编码空间比较小,可以适当缓解数据稀疏性。但是当满足如下两种情况的时候,就采用绝对值编码:
- 绝对值
 ,也就是说CA的个数不能超过3个,这样也是为了降低数据的稀疏性。
,也就是说CA的个数不能超过3个,这样也是为了降低数据的稀疏性。 - 相对值
 ,也就是说将上图中准确率比较低的那些负数值全部用绝对值替代了,在句法树中表现为
,也就是说将上图中准确率比较低的那些负数值全部用绝对值替代了,在句法树中表现为
 所在的子树比
所在的子树比
 低两层以上。
低两层以上。
输出空间太大导致label稀疏性
这个问题主要是由于三元组
 太稀疏了导致的。假设
太稀疏了导致的。假设
 ,那么这个三元组的状态空间是
,那么这个三元组的状态空间是
 ,可以通过将三元组分解为三个不同的子任务将复杂度降低为
,可以通过将三元组分解为三个不同的子任务将复杂度降低为
 。最后的损失函数定义为三个子任务的损失之和:
。最后的损失函数定义为三个子任务的损失之和:

具体实现上,可以将任务
 的输出给任务
的输出给任务
 和
和
 作为输入。
作为输入。
贪心解码导致的错误传播
这个问题在基于贪心的方法中基本都存在,也就是所谓的一步错步步错,这里主要提出了两种解决方法。
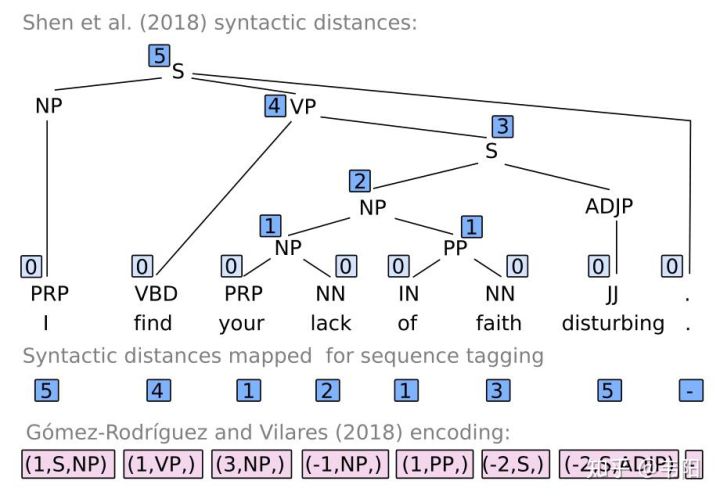
辅助任务 辅助任务主要就是用来帮助主任务学习到一些不太容易学到的信息。这里才用了两个辅助任务,一个是在预测

 ,这样就能往后多预测一步,适当的减少了贪心的影响。另一个方法就是将之前博客写到的句法距离(syntactic distances)加入到模型中一起预测:
,这样就能往后多预测一步,适当的减少了贪心的影响。另一个方法就是将之前博客写到的句法距离(syntactic distances)加入到模型中一起预测:
对于不同的辅助任务,最后将他们的损失求和加到最终的损失函数中去:

策略梯度 这个方法可以从全局的角度来对模型进行优化。假设模型在
 时刻的状态为
时刻的状态为
 ,输出标签为
,输出标签为
 ,那么模型选择
,那么模型选择
 的概率定义为策略
的概率定义为策略
 ,模型最终可以获得的奖励为
,模型最终可以获得的奖励为
 ,定义为句法树的F1值。
,定义为句法树的F1值。
定义句法树的概率为每一步决策的概率之积:

所以模型最终就是要最大化如下的奖励:

按照梯度上升的方向更新参数
 ,求梯度可得:
,求梯度可得:

将
 代入可得:
代入可得:

其中
 是根据分布
是根据分布
 采样出来的
采样出来的
 棵句法树的奖励。
棵句法树的奖励。
具体实现的时候有好几个小Tips。
第一个就是要将奖励减去一个baseline,这里定义为模型直接根据贪心求得的句法树的F1值:

这么做的目的就是为了让奖励有正有负,不然全部都是正数的话,因为采样不可能全部采样到,可能会导致高概率的样本概率越来越高,而没有采样到的低概率样本可能奖励非常高,却因此概率越来越低。
第二个Tip就是加入熵作为正则项:

目的就是使概率尽量不要太小,不然的话采样数不够的话就有可能造成采样不到小概率的样本。
还有就是给策略加入噪声:

目的同样是加大概率,防止概率太接近于0,当然这个可加可不加。。。
实验结果
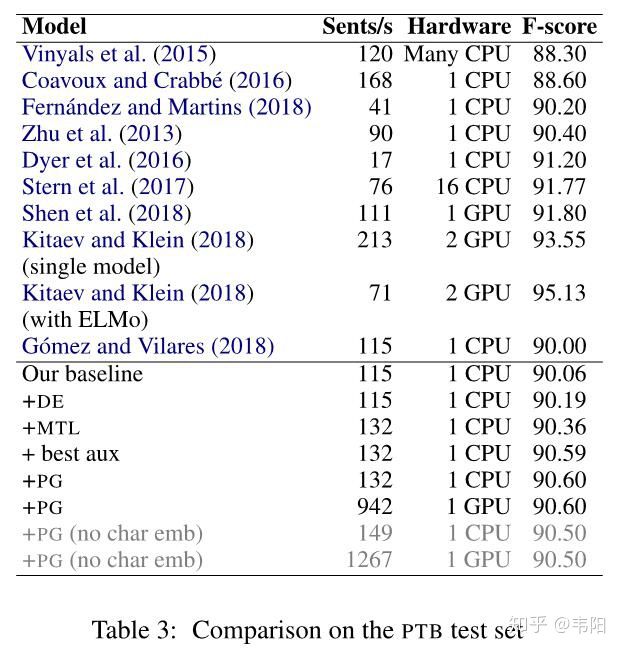
首先测试了不同设置的影响:
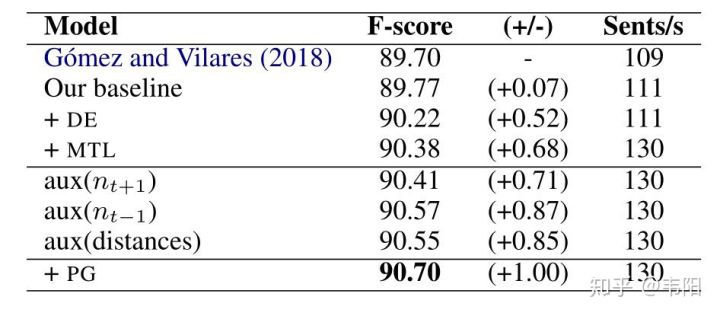
可以看出上面提到的几种方法对性能都有提升,其中采用动态编码、多任务(也就是减少输出空间)、辅助任务(主要是预测前一个
 )还有策略梯度可以获得最好的结果。
)还有策略梯度可以获得最好的结果。
最终模型在测试集上取得了90.6的F1值,虽然不是很高,但比之前的序列标注模型提升还是不少。
最后再来看一下模型在负数预测上的准确率,可以看出有了非常大的提升:
!
- 原文作者:知识铺
- 原文链接:https://geek.zshipu.com/post/%E4%BA%92%E8%81%94%E7%BD%91/%E4%B8%80%E4%B8%AA%E6%9B%B4%E5%A5%BD%E6%9B%B4%E5%BF%AB%E6%9B%B4%E5%BC%BA%E7%9A%84%E5%BA%8F%E5%88%97%E6%A0%87%E6%B3%A8%E6%88%90%E5%88%86%E5%8F%A5%E6%B3%95%E5%88%86%E6%9E%90%E5%99%A8/
- 版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议进行许可,非商业转载请注明出处(作者,原文链接),商业转载请联系作者获得授权。
- 免责声明:本页面内容均来源于站内编辑发布,部分信息来源互联网,并不意味着本站赞同其观点或者证实其内容的真实性,如涉及版权等问题,请立即联系客服进行更改或删除,保证您的合法权益。转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。也可以邮件至 sblig@126.com


